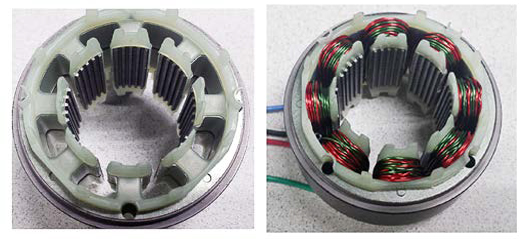
Hybrid 2-phase stepper motors can be constructed in a variety of ways internally. Although there are a number of different components within a stepper motor that have a large impact on performance, it can be argued that the most important component is the stator.
The stator can be designed in such a way where there are 8 poles, 12 poles or even 16 poles. The poles are where the wires are wound around, essentially resulting in the windings of the motor. The mechanical difference between the three types of stator designs is their relative air gap between the rotor and stator. The air gap between the rotor and stator is always nonconcentric. No stepper motor manufacturer can produce a perfect outside diameter of the rotor (rotor OD) and inside diameter of the stator (stator ID) in perfect concentricity within each other.
There is a definite air gap variation apparent in every motor. This air gap variation has a severe effect on the motor’s step accuracy. Knowing this, let’s compare the number poles in the first two 0.9° step motor designs. Typical 0.9° motors contain either 8 poles or 16 poles within their respective stators.


In the Figures 1a and 1b below, you can see that the angle between each pole on the 8-Pole design is 45°. The 16-Pole design has a 22.5° angle. As a motor steps, it is holding in one position where the stator pole is aligned with the rotor. It then moves to the next pole to align with the rotor. From one pole to the next, if the air gap is slightly smaller or larger, you will see this variation in the form of inconsistent step accuracy, vibration and resonance, and inconsistency in torque.
Notice in Figure 1a, that g1 and g2 can potentially be very different compared to Figure 1b. The closer your poles are, it minimizes the variation differences from step to step. However, there are drawbacks to each stator design. Due to space constraints of the 16 pole design, there are less winding per pole (turns per coil) which results in lower torque output. The 8 pole design doesn’t have this issue so there is not a relative drop off in torque. Even though an 8 pole design provides adequate torque, it could also have up to twice as much air gap variation when compared to a 16 pole design which results in less accuracy.
When choosing between 8 and 16 stator pole designs, customers inevitably had to choose between a lower torque motor with high accuracy or a high torque motor with less accuracy; for a time, that’s all that was available. ATO then created and patented a 12 pole stator design in order to fill in this performance gap. The 12 pole design became a great hybrid to the traditional designs as it was able to provide a suitable amount of torque while still maintaining high step accuracy.
Amongs a variety of other reasons, the unique 12 pole design allowed these stepper motors to capture the majority of the high accuracy and low noise/resonance market; to date, ATO is the highest volume manufacturer of the 1.8° stepper motor. More recently, ATO has taken the 1.8° stepper motor design to the next level with the patented Signature Series Technology. For example, the ATO-STEP-23L300 is a NEMA 23 1.8° stepper motor that utilizes the 12 pole design and is infused with Signature Series Technology. This allows for the ultimate performance: high accuracy without sacrificing an inordinate amount of winding space.
How is this done? Let’s discuss the number of teeth on the stator. In a 1.8° stepper, there are 100 teeth on the rotor. Therefore, the number of stator teeth must be less than 100. Each extra tooth that you can squeeze into the stator design will give you more torque, inherent in the design, regardless of winding space.
The standard NEMA 23 1.8° stepper design contains 8 poles and 10 teeth per pole, totaling 80 teeth on the stator. The new ATO stepper motor contains 12 poles and 7 teeth per pole, totaling 84 teeth on the stator. Even though there is less winding space in a 12 stator pole design when compared to an 8 stator pole design, the increase in the number of teeth make up the difference.