There are a wide variety of stepper motor types, some of which require very specialized drivers. For this purposes, we will focus on stepper motors that can be driven with commonly available drivers.
There are three types of stepper motors:
- Permanent magnet stepper motor
- Magnetic rotor
- Variable reluctance stepper motor
- Non-magnetic, geared rotor
- Hybrid stepper motor
- Combines characteristics from PM and VR
- Magnetic, geared rotor
Permanent magnet stepper motors
- The permanent-magnet (PM) stepper motor uses a permanent magnet for the rotor. The field consists of four poles (electromagnets).
- The motor works in the following manner: Assume the rotor is in the position shown with the south end up. When field coil 1 is energized, the south end of the rotor is attracted to coil 1 and moves toward it. Then field coil 1 is de-energized, and coil 2 is energized. The rotor pulls itself into alignment with coil 2. Thus, the rotor turns in 90° steps for each successive excitation of the field coils.
- The motor can be made to reverse by inverting the sequence.
- One desirable property of the PM stepper motor is that the rotor will tend to align up with a field pole even when no power is applied because the PM rotor will be attracted to the closest iron pole.
- The detent torque is a desirable property in many applications because it tends to hold the motor in the last position it was stepped to, even when all power is removed.
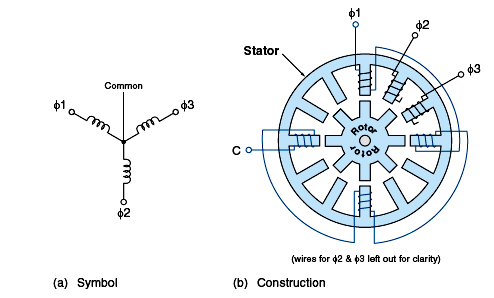
Variable reluctance stepper motors
The variable-reluctance (VR) stepper motor does not use a magnet for the rotor; instead, it uses a toothed iron wheel. The advantage of not requiring the rotor to be magnetized is that it can be made in any shape. Being iron, each rotor tooth is attracted to the closest energized field pole in the stator, but not with the same force as in the PM motor. This gives the VR motor less torque than the PM motor.
Hybrid stepper motors
The hybrid stepper motor combines the features of the PM and VR stepper motors and is the type in most common use today. The rotor is toothed, which allows for very small step angles (typically 1.8°), and it has a permanent magnet providing a small detent torque even when the power is off.

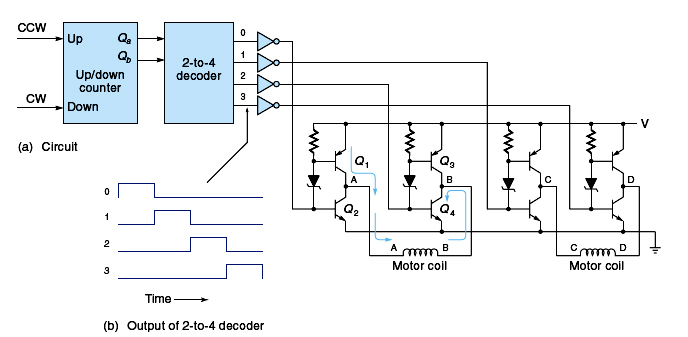
Stepper motor control circuits
- The stepper motor driver decides on the number and direction of steps to be taken (based on the application). The pulse sequence generator translates the controller’s requests into specific stepper motor coil voltages.
- The controller amplifiers boost the power of the coil drive signals. It should be clear that the stepper motor is particularly well suited for digital control; it requires no digital-to-analog conversion, and because the field poles are either on or off.
The following is controlling the two-phase stepper motor
Controlling the two-phase bipolar stepper motor requires polarity reversals, making it more complicated than four-phase motor controllers.