Stepper motors belong to the synchronous motors group. Compared to other motors, when powered, stepper motors try to keep the shaft position in a defined balanced condition. Basically, the movement is achieved from the rotation, by a magnetic field generated into the stator and by the relative rotor chase. Figure 1 shows two excitation phases (A and B) and their consequent rotation and their step position in relation to the motor shaft.

For simplicity, Figure 1 puts in the relationship between the steps and driving phases. But actually, step numbers vary in size from a few steps to several hundred steps per revolution. This depends on the number of rotor teeth and the distance from the stator poles that is usually two or four.
Unipolar and bipolar stepper motors
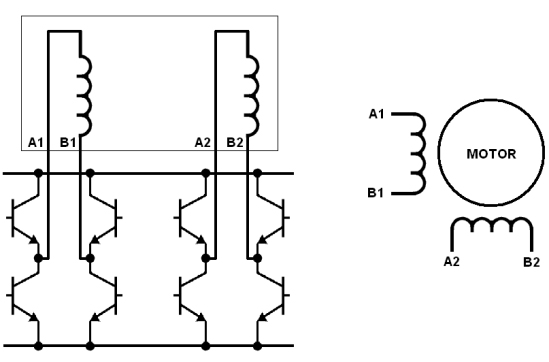
Unipolar stepper motors are the easiest to drive. They are electrically composed of four unique windings of eight wires, or four internally connected windings of six wires. It is possible to drive them with four Metal Oxide Semiconductor (MOS) or Bipolar Junction Transistor (BJT) switches as shown in Figure 2.

In the unipolar stepper motors, the winding’s current flow is always in the same direction (unipolar). The bipolar stepper motors have a simplified construction, but they require a more complex drive. A bipolar stepper’s current outflows from the power circuit and must cross each winding in two directions. This requires the use of a bridge or an equivalent circuit for each winding as shown in Figure 3.
Operation
Independently from the employed motor or from the section of power in use, the excitation phases are identical in both the unipolar and the bipolar steppers. Table 1 reports the excitation phases in the simplest modality defined as “Wavemode” or “One-phase-ON full step”.
| Step | A1 | A2 | B1 | B2 |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
In this modality, only one phase at a time is energized. For every commutation, there is a corresponding step. In this case, the angular movement is the one confirmed by the constructor.
It also permits energizing two phases simultaneously. In this modality, defined as “Two Phase ON”, the rotor finds its balance condition between the two phases. The angular movement carried out by the single step is equivalent to the preceding modality even if it has shifted a half step. Table 2 shows the winding excitation phases.
| Step | A1 | A2 | B1 | B2 |
| 1 | 1 | 1 | 0 | 0 |
| 2 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
The advantage of this second modality is that it is related to the torque that increases 1.4 times against the Wavemode modality. The two excitation phases cause a force that is perpendicular to the rotor. This resulting force is 1.4 times higher (or square root of two). Increased current consumption and motor overheating are factors taken into consideration. On the basis of the preceding modality, it is possible to obtain a third denominated “Half-step.” Alternating between Wavemode and two Phase ON phases results in an angular advancement equivalent to half steps. The motor angular resolution is then doubled; however, it gains an irregular torque (1 – 1.4 – 1 – 1.4 …).
| Step | A1 | A2 | B1 | B2 |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 1 | 1 | 0 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 0 |
| 5 | 0 | 0 | 1 | 0 |
| 6 | 0 | 0 | 1 | 1 |
| 7 | 0 | 0 | 0 | 1 |
| 8 | 1 | 0 | 0 | 1 |
A more sophisticated solution consists of the phase driving with current control. This modality is called “microstepping”. In microstepping, mode currents between adjacent phases are regulated according to their position, theoretically infinitesimal, among steps. The higher the phase current, the nearer it is to the adjacent rotor equilibrium position. Figure 4 shows the different energization between phases and relative rotor position.
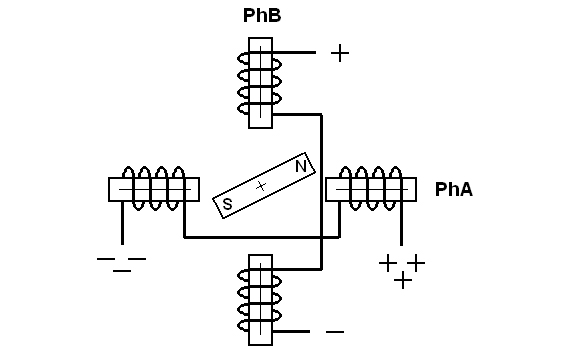
This modality reduces one of the more unpleasant disadvantages of the stepper motor, the rough erratic motor movement. This also provides more sophisticated electronics to drive PWM pulses and enables an accurate and linear current control in each phase.